


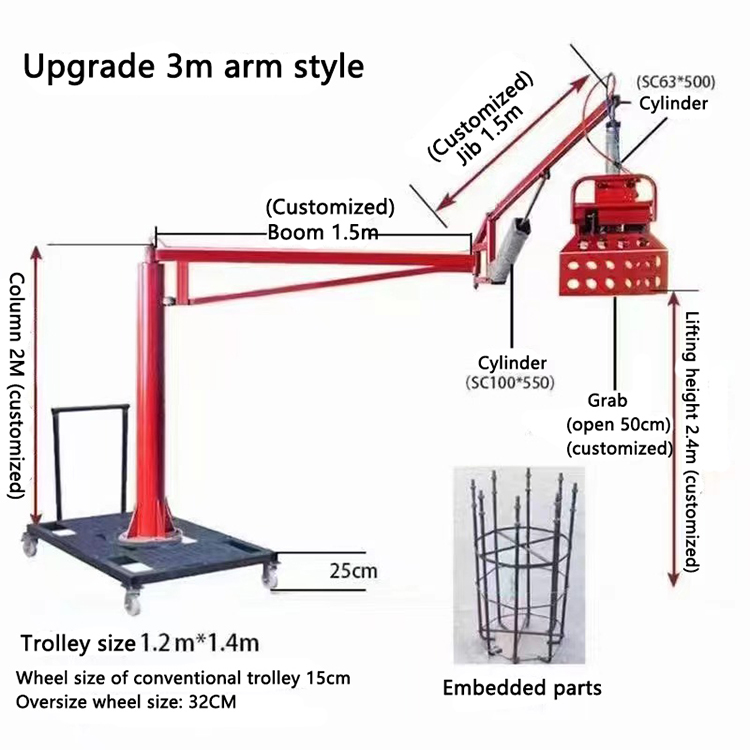
Mechanical Gripper is an automated device that imitates human hand movements, mainly used for grasping, transporting, and operating objects. It is widely used in industrial production lines, special environment operations, scientific research and education, and other fields.
1. Its core function is to achieve precise and efficient object clamping and release through preset programs or intelligent control.
Main types and characteristics
According to the driving method, mechanical grippers are mainly divided into the following categories:
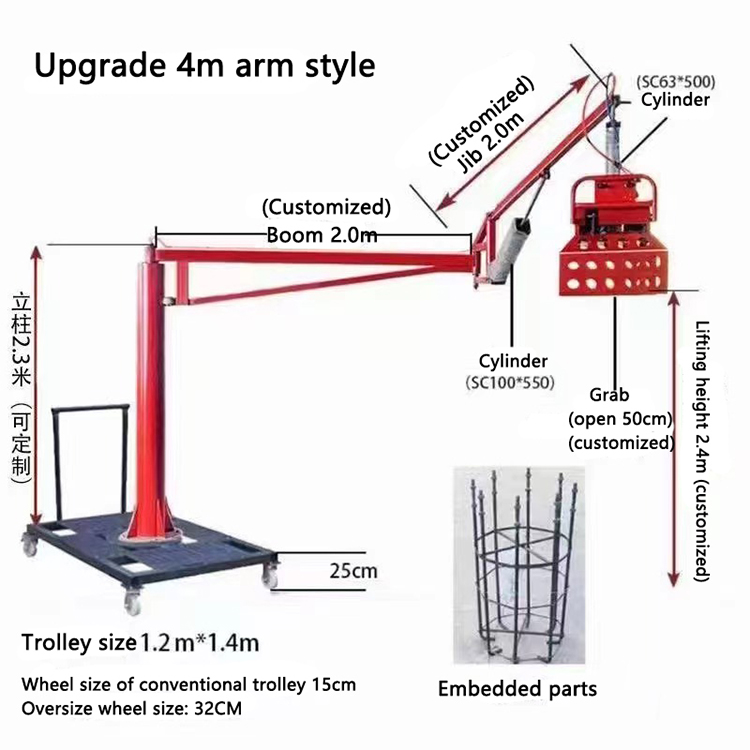
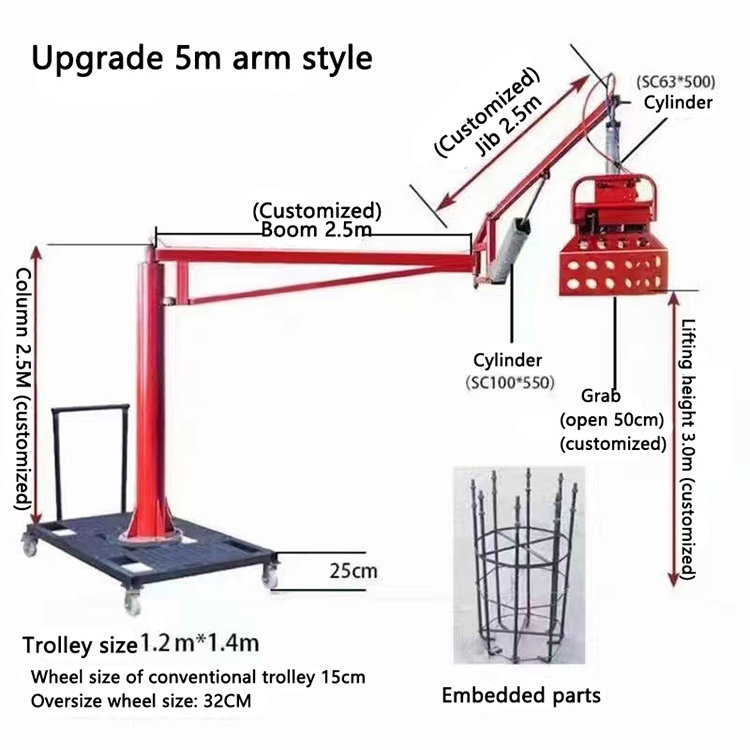
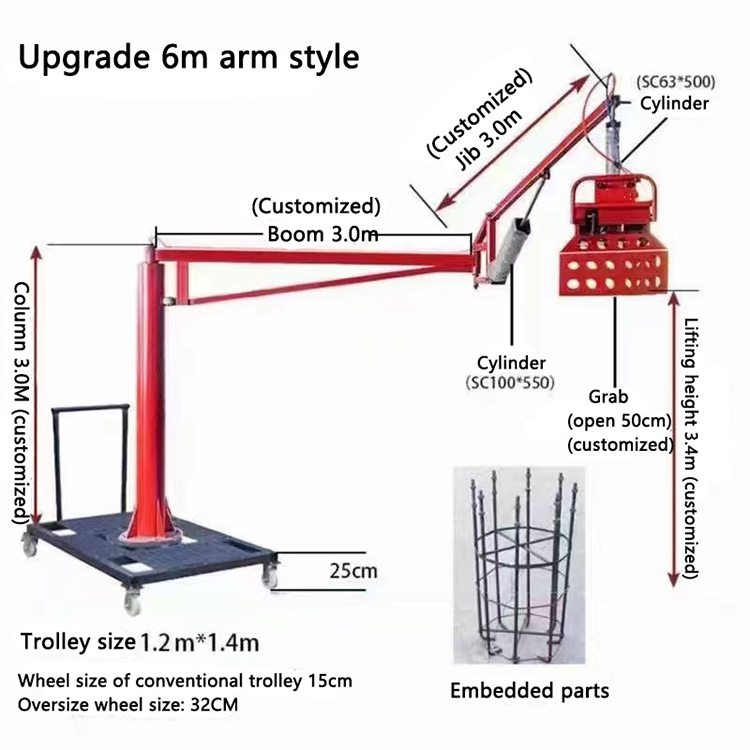
Pneumatic mechanical gripper: powered by compressed air, it has the characteristics of simple structure, low cost, and fast action, suitable for light load, high temperature, dust and other harsh environments
1. For example, pneumatic assisted robotic arms commonly used in cement and feed handling
Hydraulic mechanical gripper: Driven by hydraulic pressure, it has a large gripping capacity and smooth transmission, suitable for heavy load and continuous trajectory control, but requires strict sealing
Electric mechanical gripper: directly driven by a motor, with a simple structure, easy maintenance, fast movement speed and high precision, it is developing towards the direction of “mechatronics integration”
Flexible mechanical gripper: made of flexible materials, it can adapt to the shape of objects, avoid damage, and is suitable for scenarios such as food packaging and 3C electronics that require high gripping accuracy.

Reviews
There are no reviews yet.